ロボットとはセンサ・駆動系・知能・制御系の 3つの技術要素を有する機械システム
2025/03/18



近年では人手不足や高齢化が深刻化していることから、生産性向上に向けた取り組みが欠かせないものとなっており、その有効な解決策の一つとして産業用ロボットの導入・活用に関心が高まっている。
ロボット産業の市場は
2035年に9.7兆円に成長
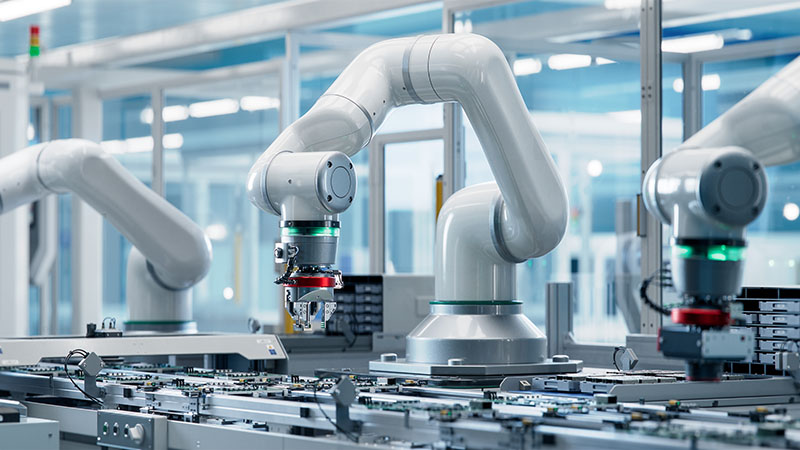
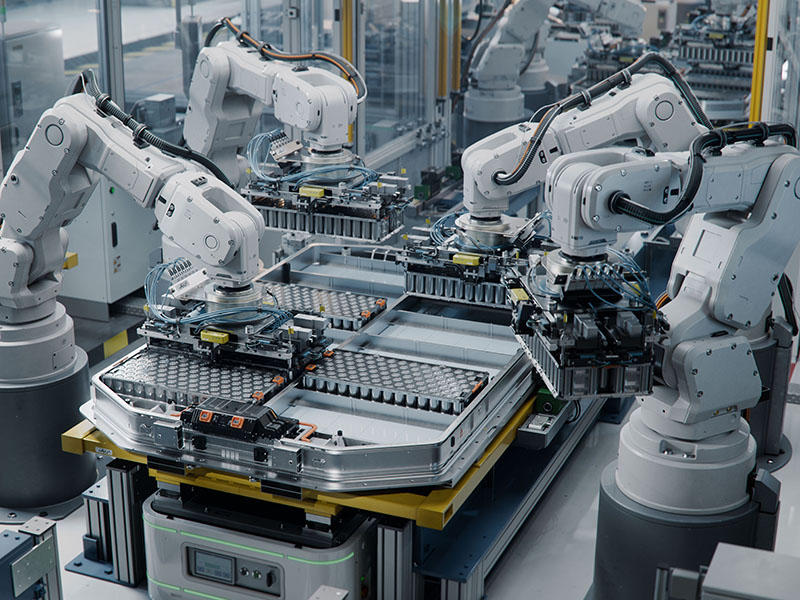
さまざまな用途に活用される産業用ロボット
自立歩行する人型ロボットから人間の変わりに作業を行う産業用ロボット、家庭用のお掃除ロボットまで、ロボットにはさまざまなものがある。その中でもっとも多く利用されているのが、製造現場向けの産業用ロボットだ。
経済産業省は2006年、「ロボット政策研究会 報告書」の中で、ロボットを「センサ、駆動系、知能・制御系の3つの技術要素(ロボットテクノロジー)を有する機械システム」と定義した。これには産業用ロボットだけでなく、ヒューマノイドやお掃除ロボットのようなものまですべて含まれる。経産省の「ロボット産業市場動向調査結果」によると、ロボット産業の市場規模は25年に5.3兆円、35年には9.7兆円に成長すると予測されている。
ひと口に産業用ロボットといっても、その種類はさまざまで、工場内の加工、組み立て、溶接、搬送、検査などあらゆる作業の自動化に活用されている。自動車産業をはじめ、電気・電子デバイス産業、半導体産業、食品産業、農業など、多種多様な業界で導入されている。
産業用ロボットは、主に以下の4つの構成で成り立っている。
①作業する腕に相当する「マニピュレータ」(マニピュレータは動いて作業する腕に相当するもの)
②マニピュレータを制御する「ロボットコントローラ」
③動作のモニタリングをする「プログラミングペンダント」
④マニピュレータとロボットコントローラを接続する「給電ケーブル」
産業用ロボットは、一般的に「3軸以上の自由度があり、プログラムによって自動制御可能なマニピュレーションロボット」のことを指す。3軸以上の自由度とは、ロボットアームに3つ以上の関節を持つロボットで、多関節ロボットと呼ばれる。多関節ロボットには垂直多関節ロボットと水平多関節ロボットがあり、人間の腕のように繊細な動きを実現できるものもある。
垂直多関節ロボットと
水平多関節ロボットの特長は
垂直多関節ロボットは、垂直方向にアームが動く多関節ロボット。高速で動くのは苦手だが、人間の腕のように立体的で自由度の高い動きを再現できるため、高温や騒音の激しい製造ラインでの搬送・組み立てなど、人間にとって過酷な作業を自動化できる。さらに、従来のロボットでは困難だった熟練工の繊細な腕の動きも再現可能だ。汎用性が高く作業範囲に対して設置面積が小さいことで導入しやすいため、産業用ロボット業界で最も高いシェアを誇っている。
水平多関節ロボットは、水平方向にアームが動く多関節ロボット。英語名の頭文字を取って通称「SCARA(スカラ)ロボット」とも呼ばれる。3つの回転動作と1つの上下動作を基本としており、動きに制限はあるが、高速作業や上下方向の剛性が必要な押し出し作業において強みを発揮する。
スカラロボットの特徴として、アーム先端部分のみが垂直に動作するため、動きが二次元的であり構造が単純だ。ただし、垂直的な動作を多用するプロセスには対応できないため、人間の三次元的で複雑な動作をスカラロボットだけで再現することはむずかしい。
現在の主流は6軸垂直多関節ロボットで、主に溶接や塗装、組み立て、搬送に使われている。汎用性の高さが魅力だが、緻密な動きをさせるには制御がむずかしいという点がデメリットといえる。また、軸数が7軸あると人間の腕に一番近く動けるといわれている。6軸だとマニピュレータが届かないような入り込んだ場所にアプローチする場合でも、もう一軸あるとアームが回り込んで接近することができる。それにより、設備をより小さく高密度で配置することができ、工場のラインレイアウトの自由度が高まる。
■DATA
「ロボット政策研究会 報告書」
「ロボット産業市場動向調査結果」
取材・文/横山渉